从苹果皮克斯台灯到开源复刻:具身智能台灯技术全景
引言:一盏灯引发的具身智能革命

2025 年 2 月,苹果机器学习研究团队在 arXiv 上发布了一篇论文,题为《ELEGNT: Expressive and Functional Movement Design for Non-anthropomorphic Robot》,展示了一款形似皮克斯 Luxo Jr. 的桌面台灯机器人原型。
这款机器人不仅能语音对话、投影信息,还能通过丰富的肢体语言表达情感——它会随着音乐起舞、被拒绝时低头委屈、回答天气前先"看向窗外"。更关键的是,这项研究为非人形机器人的交互设计建立了理论框架,指明了"情感化运动设计"如何大幅提升用户体验。
🎬 演示视频:Apple ELEGNT 官方演示 | B 站搬运
Apple ELEGNT 论文:arxiv.org/abs/2501.12493;官方页面:machinelearning.apple.com/research/elegnt
ELEGNT 项目深度拆解
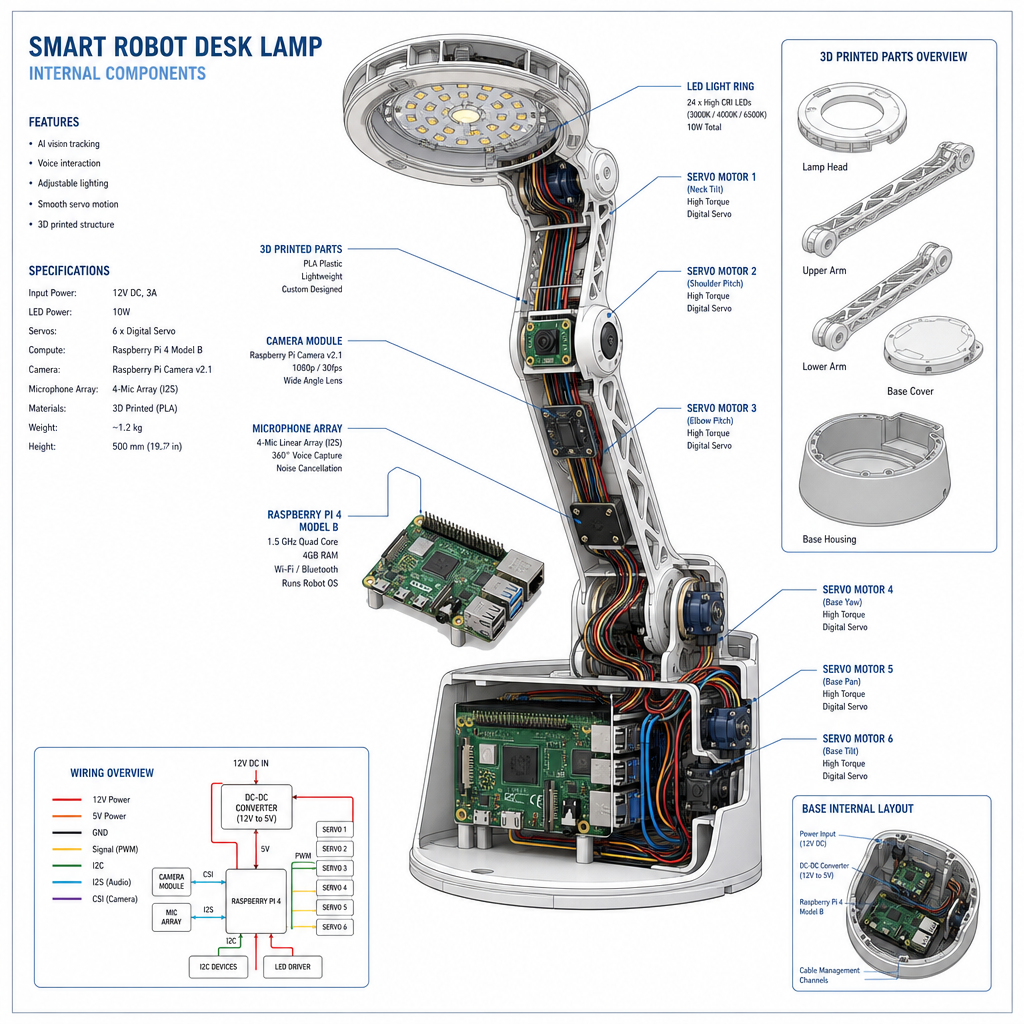
硬件配置
ELEGNT 原型机采用 6-DOF 铰接机械臂(长度约 15cm),头部集成了 LED 灯、摄像头、扬声器和投影仪,辅以激光传感器和麦克风阵列。整个系统通过多个电机控制关节实现灵活运动。
核心创新:表达型 vs 功能型
ELEGNT 框架最核心的贡献在于提出了"表达型运动"与"功能型运动"的二元对比范式。两组完全相同的硬件执行同样的任务,唯一的差异是运动风格。
询问天气:表达型会先转向窗外"看一眼"再回答;功能型直接回答,无额外动作。
播放音乐:表达型随节奏摇摆、点头;功能型静止不动。
喝水提醒:表达型把杯子轻轻推向用户并点头示意;功能型仅语音提醒。
摄影打光:表达型随用户手部移动流畅跟踪,仿佛在"注视"用户;功能型机械执行指令。
被拒绝同行:表达型垂下头表现失落;功能型无反应。
组装指导:表达型跟随动作调整光照并投影教程;功能型固定位置照明。

用户研究结果
21 名参与者的对照测试表明,表达型机器人在所有维度上都显著优于功能型:友好度提升约 2 倍,感知智能水平显著更高,交互意愿大幅增强。在社交型任务中,情感连接效果尤为突出。
这套"动物化"的肢体语言借鉴了宠物狗的行为模式——点头、歪头、摇摆、低头——使用户在不自觉中产生情感投射。这也是苹果一贯的产品哲学:技术为人服务,交互体验优先于参数堆砌。
商业化时间线
项目由苹果技术副总裁 Kevin Lynch 领导,Siri 部分由前 Vision Pro 负责人 Mike Rockwell 接手。新 Siri 内部代号 Linwood,机器人将运行全新操作系统 "Charismatic"。
开源社区复刻方案
苹果的原型虽然惊艳但毕竟闭源。好消息是,2025-2026 年开源社区涌现了优秀的复刻项目。
LeLamp:最完整的开源复刻
LeLamp 由 Human Computer Lab 开发,是全球首个直接基于 Apple ELEGNT 论文的开源实现。
硬件:5 轴舵机(点头/摇头/转头/俯仰)、树莓派 4 + Pi 摄像头、ReSpeaker 麦克风阵列、WS2812b LED 矩阵。
软件栈:LiveKit 语音管线、Groq + gpt-oss-120b 推理、LeRobot 运动控制、事件驱动架构。
关键数据:完全开源(GPL v3.0)、组装时间约 2 小时、320+ 机器人专家参与社区(来自 DeepMind、Google X 等)、50 万美元 Pre-seed 融资。
核心亮点:完全开源(电路图 + CAD 结构 + 源码),支持可中断的流体动画系统,空闲时台灯自动播放"活着的"细微动作。
SparkLamp:百元级 AI Agent 台灯
SparkLamp 由硬核高中生与创智教育团队开发,把纯软件 AI Agent(OpenClaw)塞进了物理台灯。
硬件:聆思 Arcs-Mini、M5Stack CoreS3、4 个高精度串行总线舵机、3D 打印外观。
AI 核心:OpenClaw AI Agent + 端云协同架构,声纹识别 + 情绪检测,小于 200ms 唤醒反馈。
关键数据:BOM 成本百元级、完全开源、支持私有模型接入。
技术架构对比
两个项目共享类似的软件分层:
搭建类似系统:技术路线图
如果我们要从零搭建一个具身智能台灯,可以参考以下方案。
硬件选型
BOM 总预算:约 830-1230 元。
软件栈建议
采用端云协同架构,兼顾响应速度和智能水平:
运动控制关键
借鉴 ELEGNT 框架的运动设计原则:
总结与展望
Apple ELEGNT 项目最大的价值不在于其硬件本身,而在于它为"非人形机器的情感表达"设立了设计规范。它告诉我们:机器人不需要长得像人,一盏会点头、会摇摆的台灯,同样能建立情感连接。
开源社区的反应也令人振奋——LeLamp 和 SparkLamp 证明了这类系统的工程门槛正在快速降低。从 Apple 的研究原型到社区的百元级复刻,只用了不到一年时间。
我们的项目将基于 LeLamp 的硬件框架 + SparkLamp 的端云协同思路,第一步目标是实现语音对话 + 基础情感化运动 + 灯光跟随三个核心能力。后续再叠加投影教学、多模态感知等高级功能。
万物皆可有灵,从一盏灯开始。
参考资料
>
- Apple ELEGNT Paper - arXiv:2501.12493
- LeLamp - GitHub
- SparkLamp 在线实验室
- ELEGNT 苹果官方页面
- Bloomberg: Apple's Tabletop Robot Plans